Работа вам нужна срочно. Не волнуйтесь, уложимся!
- 22423 авторов готовы помочь тебе.
- 2402 онлайн
Определить состояния равновесия системы
Данное задание относится к предмету дифференциальные уравнения, а именно к качественному исследованию обыкновенных дифференциальных уравнений и систем динамических уравнений в первом квадранте координатной плоскости. Мы будем искать состояния равновесия и проводить линейный анализ системы для определения их типа.
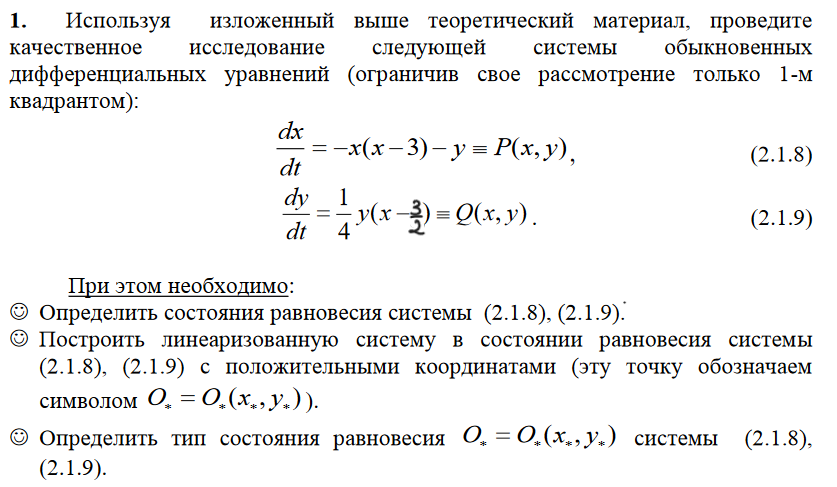
Перед нами система дифференциальных уравнений:
\[ \frac{dx}{dt} = -x(x - 3) - y = P(x, y), \tag{2.1.8} \] \[ \frac{dy}{dt} = \frac{1}{4} y \left( x - \frac{3}{2} \right) = Q(x, y). \tag{2.1.9} \]Необходимо:
Состояние равновесия — это такие точки \( (x_*, y_*) \), в которых скорости изменения переменных \( x \) и \( y \) равны нулю:
\[ \frac{dx}{dt} = 0, \quad \frac{dy}{dt} = 0. \]То есть нужно решить систему уравнений:
Это уравнение обращается в ноль, если \( y = 0 \) или \( x = \frac{3}{2} \).
Подставляем \( y = 0 \) в первое уравнение (1):
\[ -x(x - 3) = 0. \]Отсюда \( x(x - 3) = 0 \), то есть \( x = 0 \) или \( x = 3 \). Таким образом, получаем два состояния равновесия:
\( O_1(0, 0) \) и \( O_2(3, 0) \).
Подставляем \( x = \frac{3}{2} \) во второе уравнение (1):
\[ -\frac{3}{2} \left( \frac{3}{2} - 3 \right) - y = 0, \] \[ -\frac{3}{2} \left( -\frac{3}{2} \right) - y = 0, \] \[ \frac{9}{4} = y. \]Получаем еще одно состояние равновесия:
\( O_3\left( \frac{3}{2}, \frac{9}{4} \right) \).
Итак, состояния равновесия системы:
\( (0, 0), \quad (3, 0), \quad \left( \frac{3}{2}, \frac{9}{4} \right) \).
Рассмотрим точку \( O_* = \left( \frac{3}{2}, \frac{9}{4} \right) \), так как она находится в первом квадранте, где оба координаты положительны. Воспользуемся методом линеризации — для этого найдём якобиан системы:
\[ J(x, y) = \begin{pmatrix} \frac{\partial P}{\partial x} & \frac{\partial P}{\partial y} \\ \frac{\partial Q}{\partial x} & \frac{\partial Q}{\partial y} \end{pmatrix}. \]Найдём частные производные функций \( P(x, y) \) и \( Q(x, y) \). Функция \( P(x, y) \):
\[ P(x, y) = -x(x - 3) - y. \]Частные производные:
\[ \frac{\partial P}{\partial x} = -2x + 3, \quad \frac{\partial P}{\partial y} = -1. \]Функция \( Q(x, y) \):
\[ Q(x, y) = \frac{1}{4}y\left(x - \frac{3}{2}\right). \]Частные производные:
\[ \frac{\partial Q}{\partial x} = \frac{1}{4}y, \quad \frac{\partial Q}{\partial y} = \frac{1}{4}\left(x - \frac{3}{2}\right). \]Якобиан в точке \( \left( \frac{3}{2}, \frac{9}{4} \right) \):
\[ J\left( \frac{3}{2}, \frac{9}{4} \right) = \begin{pmatrix} \frac{\partial P}{\partial x} & \frac{\partial P}{\partial y} \\ \frac{\partial Q}{\partial x} & \frac{\partial Q}{\partial y} \end{pmatrix} = \begin{pmatrix} 0 & -1 \\ \frac{9}{16} & 0 \end{pmatrix}. \]Для определения типа состояния равновесия необходимо найти собственные значения матрицы Якоби. Рассмотрим характеристическое уравнение для матрицы \( J \):
\[ \det(J - \lambda I) = 0, \]где \( I \) — единичная матрица, а \( \lambda \) — собственные значения. Для матрицы
\[ J = \begin{pmatrix} 0 & -1 \\ \frac{9}{16} & 0 \end{pmatrix} \]характеристическое уравнение принимает вид:
\[ \det\begin{pmatrix} -\lambda & -1 \\ \frac{9}{16} & -\lambda \end{pmatrix} = 0, \] \[ \lambda^2 - 1 \cdot \frac{9}{16} = 0, \] \[ \lambda^2 = \frac{9}{16}, \] \[ \lambda = \pm \frac{3}{4}. \]Так как собственные значения действительные и противоположные по знаку (\( \lambda_1 = \frac{3}{4}, \lambda_2 = -\frac{3}{4} \)), точка \( \left( \frac{3}{2}, \frac{9}{4} \right) \) представляет собой седло.